
Engineering, 05.05.2020 04:17 jocelynmarquillo1
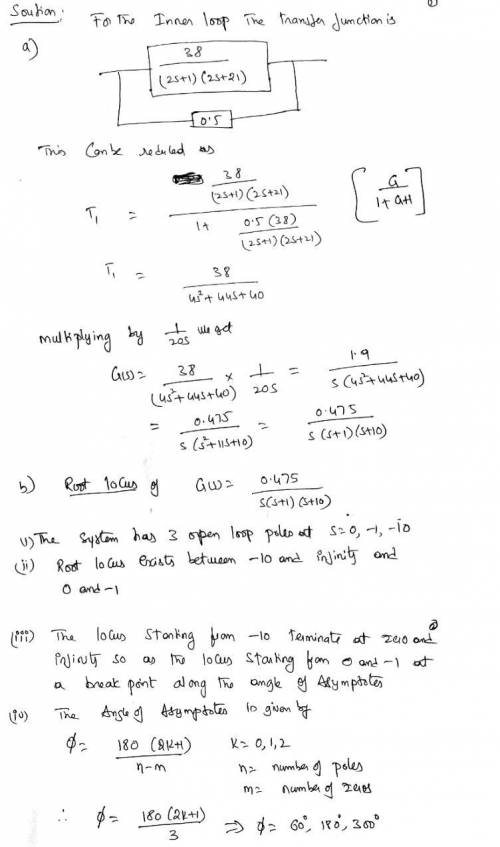
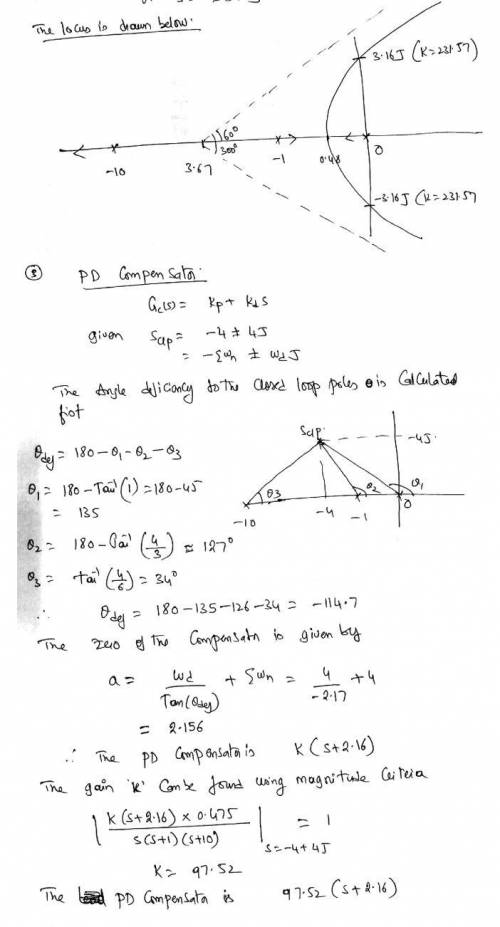
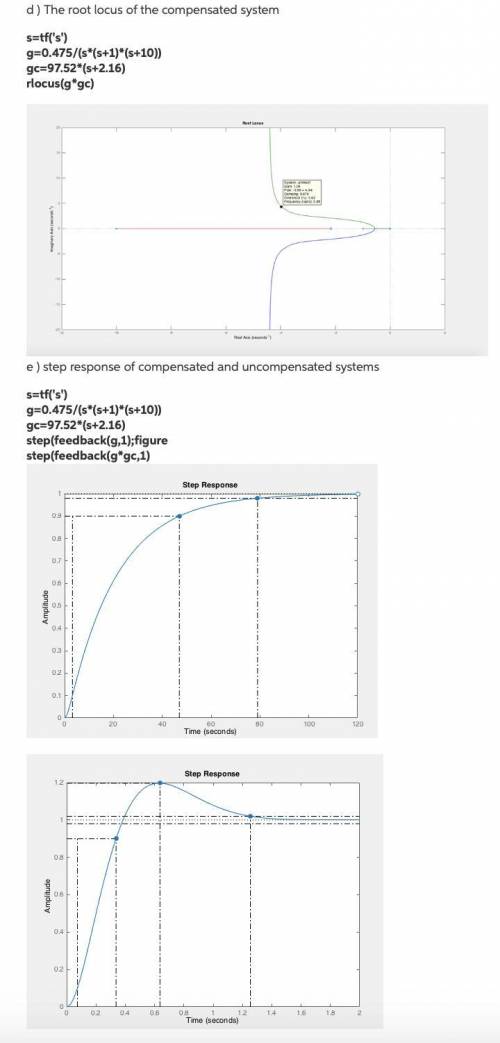
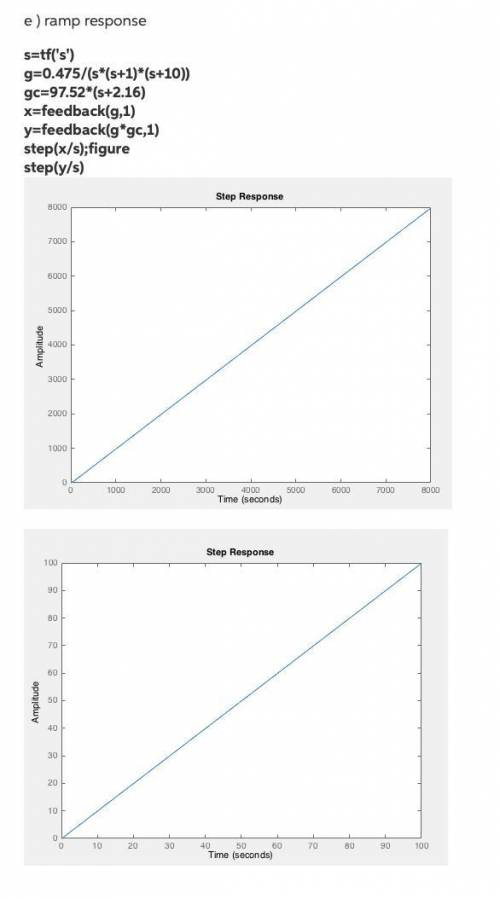
For the uncompensated system found in problem 3.(a) Design a PD compensator, Gc(s) =KP+KDs, so thats=−4±j4 are the dominantroots of the close-loop system characteristic equation. As part of the design, determinethe compensator gainsKPandKD. (Do not use Matlab for this part.)(b) Plot the step responses of the uncompensated and PD compensated system. (Hint: usestepandhold onfunctions)(c
Answers: 3

Another question on Engineering
Engineering, 03.07.2019 14:10
The y form of iron is known as: a) ferrite b) cementite c) perlite d) austenite
Answers: 3
Engineering, 04.07.2019 16:10
The force on a cutting tool are 2600n vertically downward and 2100 horizontal. determine the resultant force acting on the tool and the angle at which it acts.
Answers: 1
Engineering, 04.07.2019 18:10
Aloaded platform of total mass 500 kg is supported by a dashpot and by a set of springs of effective stiffness 72 kn/m. it is observed that when the platform is depressed through a distance x = 12.5 cm below its equilibrium position and then released without any initial velocity; it reaches its equilibrium position in the shortest possible time without overshoot. find the position and velocity of the loaded platform 0.10 sec. after its release. if a further load of 400 kg is added to the platform, find, i) the frequency of damped vibrations, and i) the amplitude of vibration after 2 complete oscillations, given that the initial amplitude is 15 cm.
Answers: 1
Engineering, 04.07.2019 18:20
Vibration monitoring this technique uses the noise or vibration created by mechanical equipment and in seme cases by plant systems to detemine their actual condtion. a)- true b)- false
Answers: 2
You know the right answer?
For the uncompensated system found in problem 3.(a) Design a PD compensator, Gc(s) =KP+KDs, so thats...
Questions

Mathematics, 11.10.2019 01:00

Chemistry, 11.10.2019 01:00


Mathematics, 11.10.2019 01:00

Geography, 11.10.2019 01:00
Mathematics, 11.10.2019 01:00
Mathematics, 11.10.2019 01:00
Mathematics, 11.10.2019 01:00
Mathematics, 11.10.2019 01:00

History, 11.10.2019 01:00


