
Mathematics, 25.01.2022 18:00 iris7324
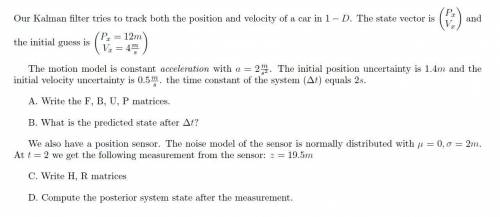
Our Kalman filter tries to track both the position and velocity of a car in 1 −D. The state vector is
Px
Vx
and
the initial guess is
Px = 12m
Vx = 4m
s
The motion model is constant acceleration with a = 2m
s2 . The initial position uncertainty is 1.4m and the
initial velocity uncertainty is 0.5m
s . the time constant of the system (Δt) equals 2s.
A. Write the F, B, U, P matrices.
B. What is the predicted state after Δt?
We also have a position sensor. The noise model of the sensor is normally distributed with μ = 0, σ = 2m.
At t = 2 we get the following measurement from the sensor: z = 19.5m
C. Write H, R matrices
D. Compute the posterior system state after the measurement.
2

Answers: 3
Another question on Mathematics
Mathematics, 21.06.2019 17:20
Read the situations in the table below. then drag a graph and equation to represent each situation. indicate whether each of the relationships is proportional or non-proportional. edit : i got the right answer its attached
Answers: 2
Mathematics, 21.06.2019 18:00
Solve this system of equations. 12x − 18y = 27 4x − 6y = 10
Answers: 1
Mathematics, 21.06.2019 19:50
Which of the following describes the graph of y--4x-36 compared to the parent square root function? stretched by a factor of 2, reflected over the x-axis, and translated 9 units right stretched by a factor of 2, reflected over the x-axis, and translated 9 units left stretched by a factor of 2, reflected over the y-axis, and translated 9 units right stretched by a factor of 2, reflected over the y-axis, and translated 9 units left save and exit next submit
Answers: 1
Mathematics, 21.06.2019 22:50
1. if events a and b are non-overlapping events, how do you find the probability that one or the other occurs? 2. what does it mean if p(a or b) equals 1?
Answers: 2
You know the right answer?
Our Kalman filter tries to track both the position and velocity of a car in 1 −D. The state vector i...
Questions
Mathematics, 12.12.2020 16:40

History, 12.12.2020 16:40
History, 12.12.2020 16:40
Mathematics, 12.12.2020 16:40
Mathematics, 12.12.2020 16:40


History, 12.12.2020 16:40


Mathematics, 12.12.2020 16:40

History, 12.12.2020 16:40


