
Physics, 26.02.2020 03:54 williamrobinson93
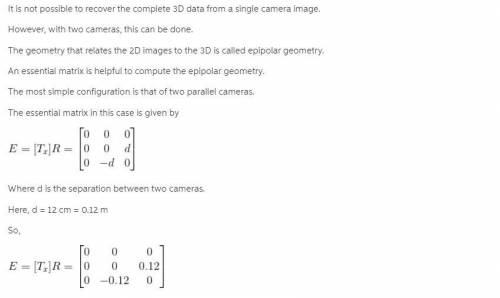
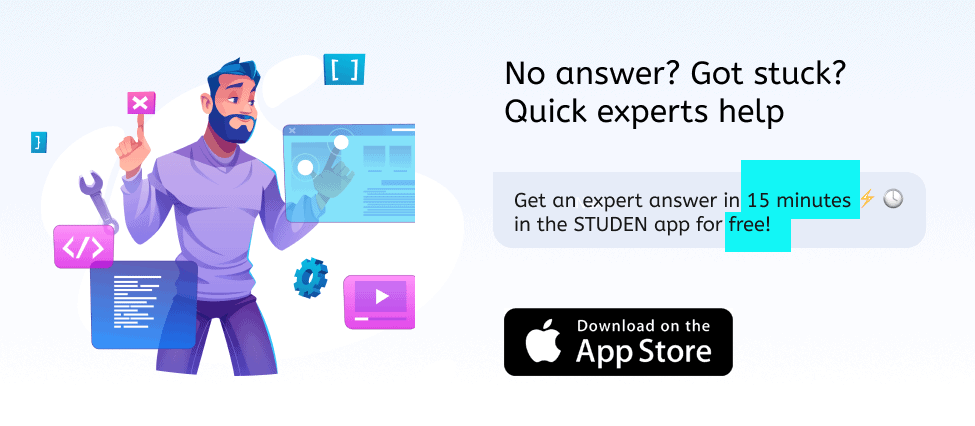
Recall that the essential matrix E describing the stereo geometry of two calibrated cameras is a function only of the relative rotation and translational offset between the two cameras. Compute the essential matrix for the following camera configurations.
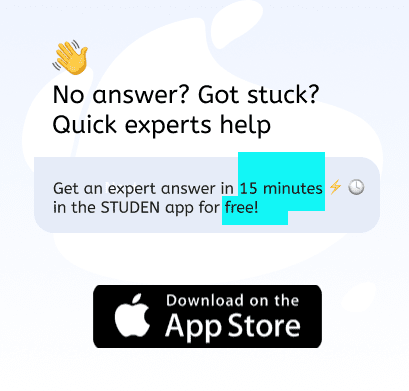
The Point Grey "Bumblebee" stereo camera is a "simple stereo" system having two cameras side-by-side with their optic axes parallel to each other. The baseline distance between the two cameras is 12 cm.
Compute the values of the 3x3 essential matrix E for this stereo system.

Answers: 2
![E=[T_{x}]R=\left[\begin{array}{ccc}0&0&0\\0&0&d\\0&-d&0\end{array}\right]](/tpl/images/0524/4786/86fc4.png)
![E=[T_{x}]R=\left[\begin{array}{ccc}0&0&0\\0&0&0.12\\0&-0.12&0\end{array}\right]](/tpl/images/0524/4786/e9936.png)
Another question on Physics
Physics, 22.06.2019 14:10
What is the weight of a 8-kg substance in n, kn, kg·m/s2, kgf, lbm·ft/s2, and lbf?
Answers: 2
Physics, 22.06.2019 17:00
The force it would take to accelerate an 900-kg car at the rate of 6m/s2
Answers: 1
Physics, 22.06.2019 21:20
Would it be correct to say the doppler effect is the apparent change in the speed of a wave due to the motion of the source? be sure to fully explain your position using at least 3 complete content related sentences.
Answers: 3
You know the right answer?
Recall that the essential matrix E describing the stereo geometry of two calibrated cameras is a fun...
Questions

Mathematics, 08.04.2020 01:15

Biology, 08.04.2020 01:15

Social Studies, 08.04.2020 01:15

History, 08.04.2020 01:15

Mathematics, 08.04.2020 01:15

English, 08.04.2020 01:15
Mathematics, 08.04.2020 01:15
Mathematics, 08.04.2020 01:15


